|
|
 |
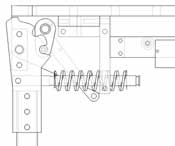
Kickstands
![]()
 |
 |
 |
While the RMP provides a robust and dynamically stable platform for Cardea, it will still fall on occasion. These failures are usually due to low system batteries. To ensure the safety of Cardea in case of a fall, we have developed two active kickstands mounted underneath the RMP optical plate. If the RMP encounters a E-stop, a over-inclination error, or some other detectable system error, the Cardea controller generates an digital trigger to deploy the kickstands.
 |
 |
The trigger activates a small DC motor that unlatches the spring loaded legs. The legs quickly deploy and latch at 45 degrees and the RMP can then safely fall forward on to them. The ballast weight necessary for the RMP stability translates into large forces onto the kickstands during a fall. Consequently, the kickstands are of heavy stainless steel and aluminum construction.
The kickstand was developed by Aaron Edsinger.