Iterative Closest Point,
presented by M.T. Hajiaghayi
Problem and Motivation
-
Align two (triangular) meshes, given initial guess for
their relative positions
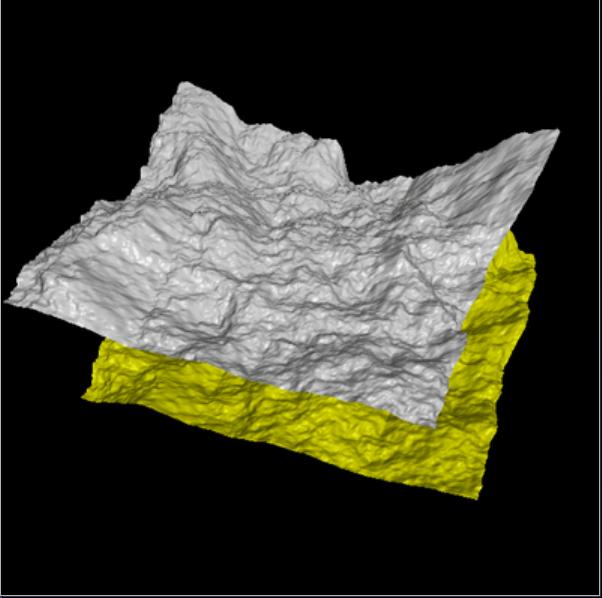
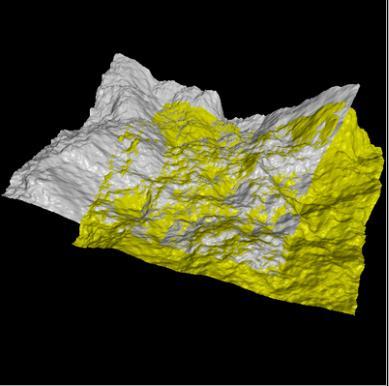
-
Registering (matching) images of a 3D-scanner which returns
range images from one direction
-
Pose estimation, alignment and motion estimation
Next