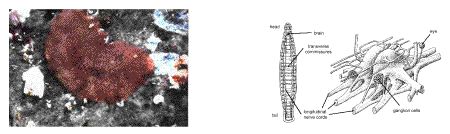
Figure 1: A notoplana acticola (left). This flatworm's brain (right) can be excised, flipped over, and reinserted without any serious loss of function.
Using Developmental Neural Nets to Achieve Robust Behavior
Bryan Adams
What: Robots with hand-designed controllers are already engaged in a wide variety of behaviors, from sweeping floors to wandering the surface of Mars. But none of these robots will ever be confused with a living creature. When a typical robot becomes confused or trapped, it has a limited repertoire of actions it can take to solve its problems. For example, when Spirit, the Mars rover, encountered a memory problem, it rebooted itself over and over, never noticing the continued futility of its behavior.
But where robots like this are pensive and brittle, animals are impulsive and robust. Animals do not exhibit this kind of mindless, repetitive behavior when faced with adversity. They adapt very quickly to changes in their environment, employing a wide range of behaviors in pursuit of their goals. If robots are going to become a significant part of every-day life, they must behave more like animals. Synthetic Brains, a new kind of developmental biological neural network for controlling robots, is a first step in generating this kind of behavior.
Why: In order to design a robot controller that will generate animal-like behavior, it is instructive to examine nature's earliest brain designs. One of the first phylogenic examples of encephalization (the formation of one central brain) is found in the notoplana acticola flatworm (Figure 1). Using roughly 2000 neurons, this creature is able to perform a variety of behaviors aimed at survival: keeping itself upright, walking, avoiding predators, and eating.
Figure 1: A notoplana acticola (left). This flatworm's brain (right) can be excised, flipped over, and reinserted without any serious loss of function.
But a series of brain experiments performed on these worms shows that this creature's robustness is internal as well as external [1]. The flatworm's brain communicates with the rest of its body through six longitudinal nerves. If the brain is removed, flipped 180 degrees in any direction, and reinserted, the flatworm is not only able to regenerate connections to the brain, but the brain is able to adapt and restore almost full functionality to the flatworm. This remarkable adaptability stands in stark contrast to, say, a modern microchip. Not only would the chip not function if plugged in backwards, but it also would most likely be destroyed. Understanding and recreating this remarkable robustness is the primary goal of the Synthetic Brains project.
How: When McCulloch and Pitts [2] formulated a model of a squid neuron, they did so with an eye toward reductionism: they wanted to understand how the basic piece of the brain worked in an effort to understand the whole thing. While that model served as a crucial building block in the understanding of animal brains, it also removed many of the features that make animal brains unique as controllers. This project is dedicated to investigating those features with the hope of finding a combination of them that, when included in a new model, will create the desired robust behavior. Some specific features currently under investigation are as follows:
Cell development. Real brains are not created all at once, but instead grow and develop from a small group of cells. Synthetic Brains start with a single cell that divides and differentiates.
Genetic regulatory networks. Real brains develop according to a genetic code. Synthetic Brain development proceeds according to the proteins that are produced by a 5kbp genome.
Axon guidance. Real brains are not organized into three fully connected layers, but instead connect the cells according to a growth and connection process. Synthetic Brains simulate this process, including a growth and connection period that overlaps the creature's interaction with its environment.
Progress: I have built and tested Synthetic Brains in a simulated environment, and the preliminary results have been encouraging. A brief evolutionary period is enough to go from completely random brains to a brain that controls a simulated arm reaching for a target. While the behavior generated by this controller is still inferior to behaviors generated by hand-designed algorithms, the resulting networks (an example shown in Figure 2) are sufficiently complex to warrant further investigation.
Figure 2: Simulation of the neural development processes similar to those found in the flatworm has resulted in some interesting networks.
Future: The technical goal of this project is to create useful robotic behaviors through evolution and development. If successful, the controllers that are evolved in simulation will be able to be transferred directly to a real robot and, with an additional development period, still be able to generate similarly functional behavior. In this way, Synthetic Brains can provide a solution to the problem of how evolutionary algorithms can be applied to physical robots.
However, the ultimate goal of this project is to develop robot controllers with a level of robustness similar to that of the flatworm. The litmus test for this research will be to simulate the flatworm experiment on a robot: develop a brain and demonstrate its behavior, unplug the robot and plug it in backwards, re-develop the brain, and recreate the behavior.
References:
[1] Lynnae Davies, Larry Keenan, and Harold Koopowitz. Nerve repair and behavioral recovery following braintransplantation in notoplana acticola, a polyclad flatworm. The Journal of Experimental Zoology, 235:157-173, 1985.
[2] H. D. Landahl, Warren S. McCulloch, and Walter Pitts. A statistical consequence of the logical calculus ofnervous nets. Bulletin of Mathematical Biophysics, 5:135-137, 1943.