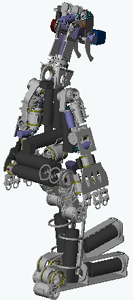
Pinky (a mechanical humanoid robot - not related to MIT leg lab M2 bipped robot!!) and the brain (a cart with his electronic hardware and processing units) that pinky pushes, is my view of the future for building humanoid robots based on Artur Arsenio's experience in building robots (both at mechanical, hardware and software levels) at the MIT AILab. I am designing this robot at the AILAB humanoid robotics group.
Pinky is a new concept for a humanoid robot that I am trying to develop, and comercialize in the future; Since it will require large computational power, It will possibly have a cart that will contain the brain, and which Pinky will push as he walks, so that the overall system is completely autonomous.