- Select samples such that normals distributed as uniformly as possible
- Bucket the points according to the position of the normals in angular space, then sample uniformly across the buckets
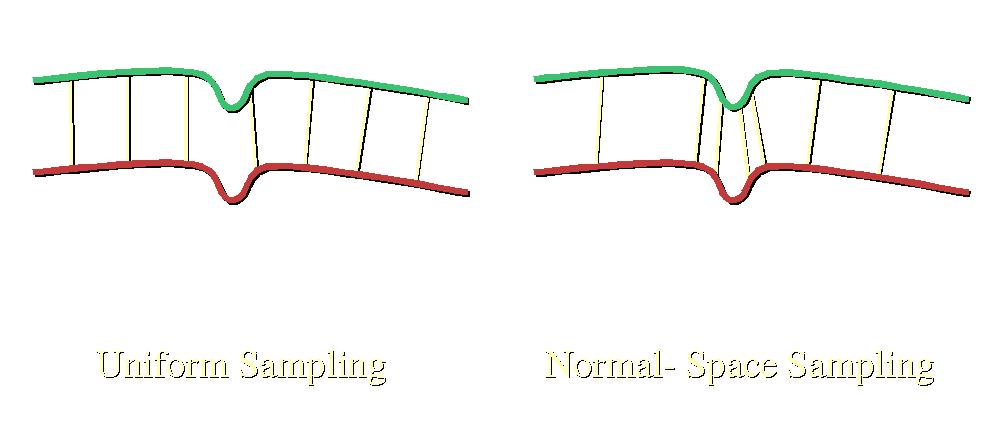
- It is more robust for mostly-smooth areas with sparse features such as incised planes