The equipment relevant to this project is the sub-bottom profiler developed by Dr. David Mindell and the DeepArch research group.

Sub-bottom profiler
Black Sea Volumetric Rendering
6.837 Computer Graphics Bill Wallis and Michael Dewberry
| Next |
|
Data for this project was gathered in the Black Sea using
the Jason submersible robot. Jason carries a large amount of
instrumentation and can be maneuvered at constant depth and velocity
at speeds around 10cm/second, a remarkable feat in the open sea. The equipment relevant to this project is the sub-bottom profiler developed by Dr. David Mindell and the DeepArch research group. | Sub-bottom profiler |
| The subbottom profiler ... | 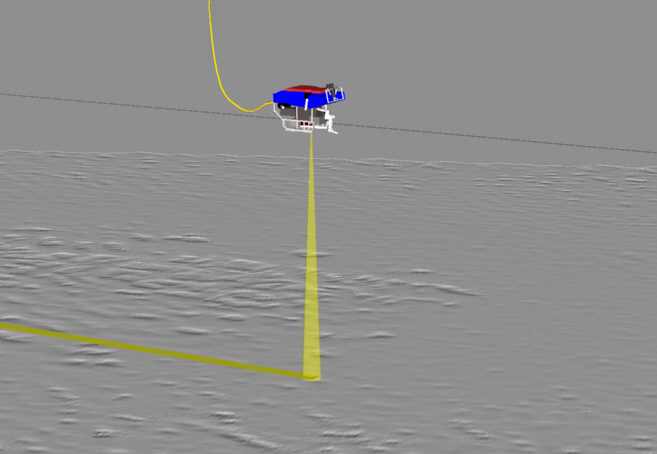 Recording a sub-bottom track |
| A pulse is sent meters deep into the mud... | 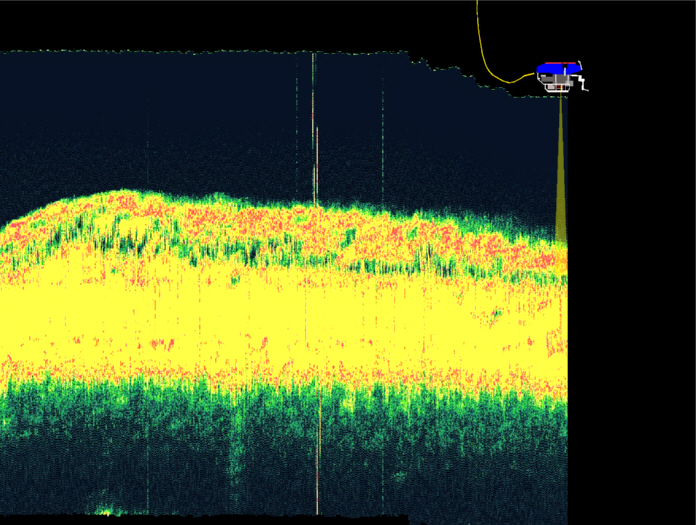 Recording a sub-bottom track |
| Side-scanning sonar records X,Y,Z coordinates of the seafloor surface... | 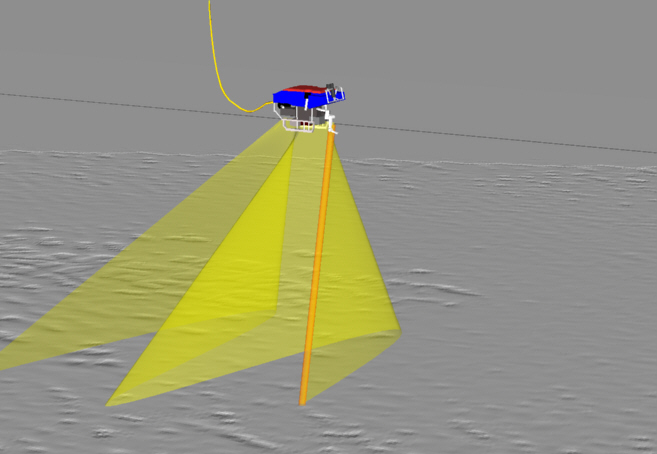 Jason takes floor mesh data as it moves over the floor |
| Next |