|
|
|
Figure 1: Contextual recognition of head gestures during face-to-face interaction with an embodied agent. |
Head pose and gesture offer several key conversational grounding cues and are used extensively in face-to-face interaction among people. We investigate how dialog context from an embodied conversational agent (ECA) can improve visual recognition of user gestures. We present a recognition framework which (1) extracts contextual features from an ECA's dialog manager, (2) computes a prediction of head nod and head shakes, and (3) integrates the contextual predictions with the visual observation of a vision-based head gesture recognizer. We found a subset of lexical, punctuation and timing features that are easily available in most ECA architectures and can be used to learn how to predict user feedback. Using a discriminative approach to contextual prediction and multi-modal integration, we were able to improve the performance of head gesture detection even when the topic of the test set was significantly different than the training set.
During face-to-face conversation, people use visual feedback to communicate relevant information and to synchronize rhythm between participants. A good example of nonverbal feedback is head nodding and its use for visual grounding, turn-taking and answering yes/no questions. When recognizing visual feedback, people use more than their visual perception. Knowledge about the current topic and expectations from previous utterances help guide our visual perception in recognizing nonverbal cues. Our goal is to equip an embodied conversational agent (ECA) with the ability to use contextual information for performing visual feedback recognition much in the same way people do.
In the last decade, many ECAs have been developed for face-to-face interaction. A key component of these systems is the dialogue manager, usually consisting of a history of the past events, the current state, and an agenda of future actions. The dialogue manager uses contextual information to decide which verbal or nonverbal action the agent should perform next. This is called context-based synthesis.
Contextual information has proven useful for aiding speech recognition [1]. In [1], the grammar of the speech recognizer dynamically changes depending on the agent's previous action or utterance. In a similar fashion, we want to develop a context-based visual recognition module that builds upon the contextual information available in the dialogue manager to improve performance.
The use of dialogue context for visual gesture recognition has, to our knowledge, not been explored before for conversational interaction. In this paper we present a prediction framework for incorporating dialogue context with vision-based head gesture recognition. The contextual features are derived from the utterances of the ECA, which is readily available from the dialogue manager. We highlight three types of contextual features: lexical, punctuation, and timing, and selected a subset for our experiment that were topic independent. We use a discriminative approach to predict head nods and head shakes from a small set of recorded interactions. We then combine the contextual predictions with a vision-based recognition algorithm based on the frequency pattern of the user's head motion. Our context-based recognition framework allows us to predict, for example, that in certain contexts a glance is not likely whereas a head shake or nod is (as in Figure 1), or that a head nod is not likely and a head nod misperceived by the vision system can be ignored.
|
|
|
Figure 1: Contextual recognition of head gestures during face-to-face interaction with an embodied agent. |
During face-to-face interactions, people use knowledge about the current dialog to anticipate visual feedback from their interlocutor. As depicted in Figure 1, knowledge of the ECA's spoken utterance can help predict which visual feedback is most likely.
The idea of this paper is to use this existing information to predict when
visual feedback gestures from the user are likely. Since the dialog manager is
already merging information from the input
devices with the history and the discourse model, the output of the dialog
manager will contain useful contextual information. We highlight four types of
contextual features easily available in the dialog manager:
Lexical features Lexical features are computed from the words said by the
embodied agent. By analyzing the word content of the current or next utterance,
one should be able to anticipate certain visual feedback. For example, if the
current spoken utterance started with ``Do you'', the interlocutor will most
likely answer using affirmation or negation. In this case, it is also likely to
see visual feedback like a head nod or a head shake. On the other hand, if the
current spoken utterance started with ``What'', then it's unlikely to see the
listener head shake or head nod--other visual feedback gestures (e.g., pointing)
are more likely in this case.
Punctuation features Punctuation features modify the way the text-to-speech engine will pronounce an utterance. Punctuation features can be seen as a substitute for more complex prosodic processing that are not yet available from most speech synthesizers. A comma in the middle of a sentence will produce a short pause, which will most likely trigger some feedback from the listener. A question mark at the end of the sentence represents a question that should be answered by the listener. When merged with lexical features, the punctuation features can help recognize situations (e.g., yes/no questions) where the listener will most likely use head gestures to answer.
Timing Timing is an important part of spoken language and information about when a specific word is spoken or when a sentence ends is critical. This information can aid the ECA to anticipate visual grounding feedback. People naturally give visual feedback (e.g., head nods) during pauses of the speaker as well as just before the pause occurs. In natural language processing (NLP), lexical and syntactic features are predominant but for face-to-face interaction with an ECA, timing is also an important feature.
Gesture display Gesture synthesis is a key capability of ECAs and it can also be leveraged as a context cue for gesture interpretation. As described in [2], visual feedback synthesis can improve the engagement of the user with the ECA. The gestures expressed by the ECA influence the type of visual feedback from the human participant. For example, if the agent makes a deictic gesture, the user is more likely to look at the location that the ECA is pointing to.
The following experiment demonstrates how contextual features inferred from an agent's spoken dialogue can improve head nod and head shake recognition. The experiment compares the performance of the vision-only recognizer with the context-only prediction and with multi-modal integration. For this experiment, a first data set was used to train the contextual predictor and the multi-modal integrator , while a second data set with a different topic was used to evaluate the head gesture recognition performance. In the training data set, the robot interacted with the participant by demonstrating its own abilities and characteristics. This data set, called Self, contains 7 interactions. The test data set, called iGlass, consists of nine interactions of the robot describing the iGlassware invention.
For both data sets, human participants were video recorded while interacting with the robot. The vision-based head tracking and head gesture recognition was run online. The robot's conversational model determines the next activity on the agenda using a predefined set of engagement rules, originally based on human--human interaction [2]. Each interaction lasted between 2 and 5 minutes.
During each interaction, we also recorded the results of the vision-based head gesture recognizer [3] as well as the contextual cues (spoken utterances with start time and duration) from the dialog manager. These contextual cues were later automatically processed to create the contextual features necessary for the contextual predictor. For ground truth, we hand labeled each video sequence to determine exactly when the participant nodded or shook his/her head. A total of 274 head nods and 14 head shakes were naturally performed by the participants while interacting with the robot.
Our hypothesis was that the inclusion of contextual information within the head gesture recognizer would increase the number of recognized head nods while reducing the number of false detections. We tested three different configurations: (1) using the vision-only approach, (2) using only the contextual information as input (contextual predictor), and (3) combining the contextual information with the results of the visual approach (multi-modal integration).
 |
 |
|
|
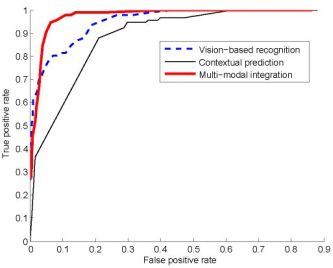
Figure 2: Head nod recognition curves when varying the detection threshold. |
Figure 3: Head shake recognition curves when varying the detection threshold. |
Figure 2 shows head nod detection results for all 9 subjects used during testing. The ROC curves present the detection performance each recognition algorithm when varying the detection threshold. The areas under the curve for each techniques are 0.9543 for the vision only, 0.7923 for the predictor and 0.9722 for the integrator.
Figure 3 shows head shake detection results for each recognition algorithm when varying the detection threshold. The areas under the curve for each techniques are 0.9782 for the vision only, 0.8521 for the predictor and 0.9684 for the integrator.
Our results show that contextual information can improve user gesture recognition for interactions with embodied conversational agents. We presented a prediction framework that extracts knowledge from the spoken dialogue of an embodied agent to predict which head gesture is most likely. By using simple lexical, punctuation, and timing context features, we were able to improve the recognition rate of the vision-only head gesture recognizer from 75\% to 90\% for head nods and from 84\% to 100\% for head shakes. As future work, we plan to experiment with a richer set of contextual cues including those based on gesture display, and to incorporate general feature selection to our prediction framework so that a wide range of potential context features can be considered and the optimal set determined from a training corpus.
[1] Lemon, Gruenstein, and Stanley Peters. Collaborative activities and multi-tasking in dialogue systems. Traitement Automatique des Langues (TAL), special issue on dialogue, 43(2):131–154, 2002.
[2] Justine Cassell and Kristinn R. Thorisson. The poser of a nod and a glance: Envelope vs. emotional feedback in animated conversational agents. Applied Artificial Intelligence, 1999.
[3] Candace Sidner, Christopher Lee, Cory D. Kidd, Neal Lesh, and C. Rich. Explorations in engagement for humans and robots. Artificial Intelligence, 166(1–2):140–164, August 2005.
[4] Louis-Philippe Morency, Ali Rahimi and Trevor Darrell. Adaptive view-based appearance model. In Proceedings IEEE Conf. on Computer Vision and Pattern Recognition, volume 1, pages 803–810, 2003.
.
