Download
Full Dataset
Register here to download the ADE20K dataset and annotations. By doing so, you agree to the terms of use.
Toolkit
See our GitHub Repository for an overview of how to access and explore ADE20K.
Scene Parsing Benchmark
Scene parsing data and part segmentation data derived from ADE20K dataset could be downloaded from MIT Scene Parsing Benchmark.
Terms of Use
See ADE20K's dataset Terms of Use

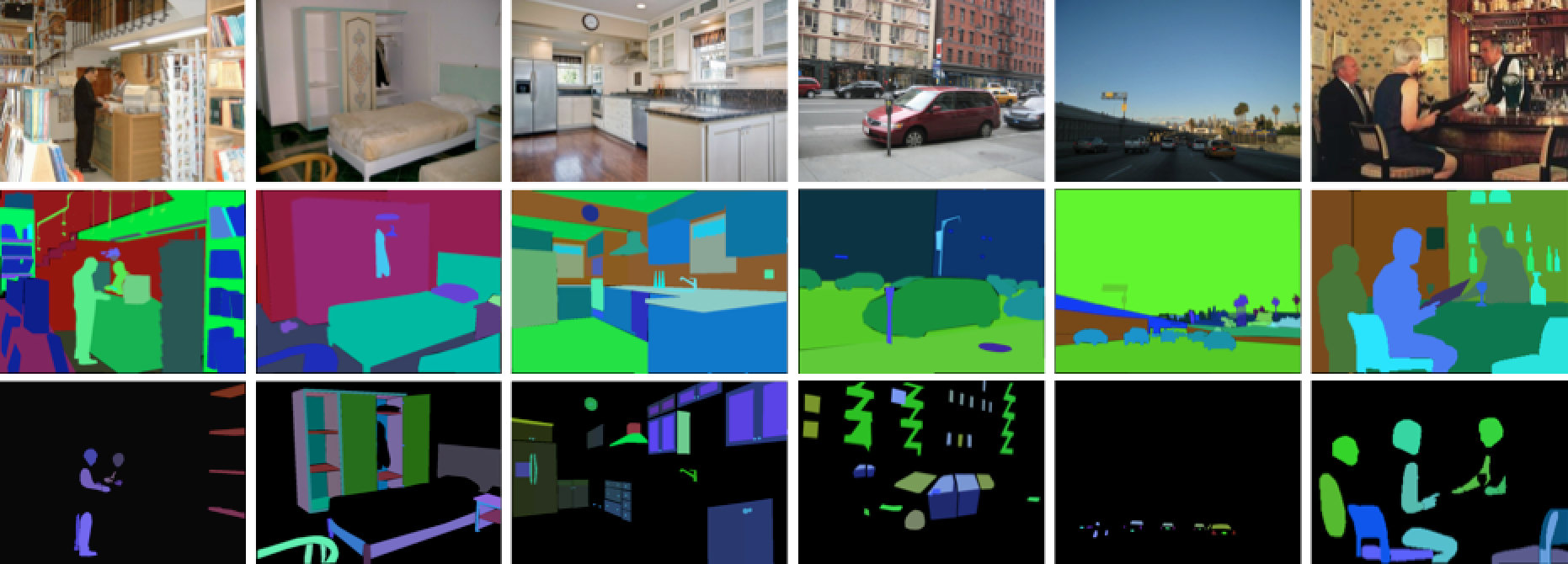
Training set
25.574 images
All images are fully annotated with objects and, many of the images have parts too.
Validation set
2.000 images
Fully annotated with objects and parts

Test set
Images to be released later.
Consistency set
64 images and annotations used for checking the annotation consistency (download)