
GL generates normals based on the order of vertices
glFrontFace (GL_CCW); //sets front-facing side to where vertices go counterclockwise
Simplify the visibility task without necessarily solving it completely.
Assumes the presence of other visibility algorithms to resolve exact visibility
if the object does not intersect the view frustum, throw it out!
use: when you can't see a lot of objects, this is worth it.
time: O(n) if used as preprocessor
preprocessing: none
coherence: object
scene footprint: total
memory footprint: one object and the view frustum
potential overdraw: occluded objects in the view frustum
clipping: partial - objects entirely outside the view frustum
are clipped correctly
transparent objects: supported
idea: if a face of an object points away from the viewer, it must be occluded by some front-facing face.
for each face F of each object
N = outward-pointing normal of F
if N dot V > 0, throw away the face
GL generates normals based on the order of vertices
glFrontFace (GL_CCW); //sets front-facing side to
where vertices go counterclockwise
glEnable (GL_CULL_FACE);
glCullFace (GL_BACK);
use: lots of back faces.
time: O(f), where f is the # of faces
preprocessing: normals for each face
coherence: object
scene footprint: total
memory footprint: one face and the view vector
potential overdraw: occluded front faces
clipping: no
transparent objects: not supported
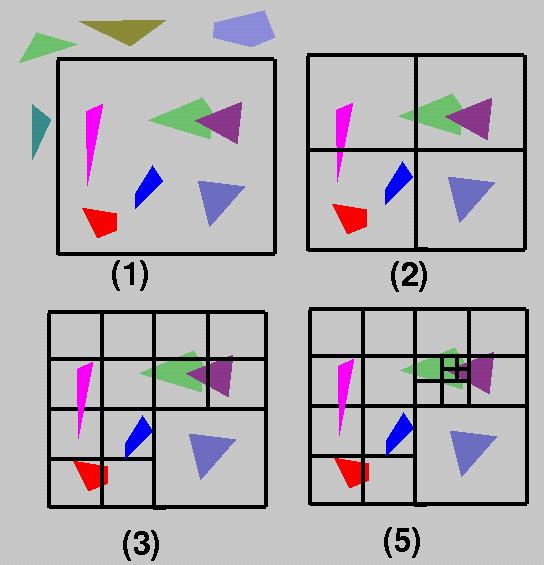
1)for each object
2)if we have zero or one incident object
we're done with visibility for this portion of the
screen
else
subdivide into smaller frusta, distribute our objects
down to them, and recurse..
...unless we're at the pixel level already, in which
case
DEMO
use: scenes with little occlusion
preprocessing: none
coherence: image-space
scene footprint: total
memory footprint: requires an incidence list per frustum
potential overdraw: occluded objects within subfrusta
clipping: yes
transparent objects: supported
scene divided into "occluders" (walls) and "detail objects" (smaller objects within a room)
Setup
How to determine the PVO's?
DEMO
Find_Visible_Cells (cell C, portal sequence L, visible cell set V)
{
V += C;
for each of C's portals P
if (Stabbing_Line_Exists
(L + P))
Find_Visible_Cells (C, L+P, V);
}
also store this in a "stab tree"
cell-to-region visibility
cell-to-obj visibility
for each visible region in the stab tree
for each object in its cell not already deemed visible
if the object intersects
the region, associate it with the cell
eye-to-cell visibility
use the stab tree
if there exists a ray inside the view frustum through a portal sequence,
that cell is visible
eye-to-region visibility
for each visible path in the stab tree
use: architectural walkthroughs, PhD topics
preprocessing: create k-d tree
coherence: none?
scene footprint: at runtime, the PVO for the current cell
memory footprint: the PVO list and stab tree structure for the
current cell
potential overdraw: occluded objects within the PVO
clipping: dynamically, yes
transparent objects: detail objects, yes; walls, no
runtime
Draw (cell) {
scan-convert the cell's bbox
if it's totally occluded or totally clipped, throw
it out
if we're a leaf node, draw our objects
otherwise draw near child; draw far child
}
use temporal coherence:
use: large data sets
preprocessing: create k-d tree
coherence:
temporal - as discussed
image-space - scan converts objects
object and world space - uses cells
scene footprint: objects within k-d cells within the view frustum
memory footprint: a k-d cell and its contents.
potential overdraw: occluded/clipped objects in visible cells
clipping: yes
transparent objects: supported
run-time
1)choose N objects as occluders (vary N according to occluder effectiveness
in the previous frame)
 example
of Hierarchical Occlusion Map
example
of Hierarchical Occlusion Map
4)keep depth estimate - the farthest Z of any occluder, or farthest
Z's for some screen-space subdivision
5)Get the set of potentially visible objects for this view frustum,
somehow
6) For each object
2)otherwise, try to reject the object as occluded
Get the object's screen-space projection and read off its corresponding
values in the HOM
for each pixel we need to check in the HOM:
use: scenes with lots of occlusion from nearby objects
preprocessing: an occluder database (Coorg & Teller 96 compute
this dynamically)
coherence:
temporal - supposedly uses occluders from last frame
image-space - relies on occluder coherence to cover
the scene
scene footprint: presumably traverses all the objects
memory footprint: the HOM's, an individual object to render
potential overdraw: occluded occluders; occluded objects in
the view frustum have some work done to reject them
clipping: no
transparent objects: not supported