
6.837 F98 Lecture 16: November 10, 1998
(Thanks to John Alex for help preparing these slides.)
Administrative
Visibility
Our trip through the graphics pipeline is nearly complete.
We now know how to transform,
clip, and project polygons into NDC
(Canonical
coordinates, normalized device coordinates)
But we only recently addressed
what to do when scene primitive is invisible;
that
is, when it contributes no pixels to the rendered framebuffer.
A scene primitive can be invisible for three reasons:
Second example of visibility computation: back-face elimination


Q. How can we
implement this?
Idea: compare view direction, face normal
for each face F of each object
N = outward-pointing
normal of F
if N
dot V > 0, throw away the face

Can we apply this "normal test" anywhere in the pipeline?

When should back-face
culling be used?
What is its cost for
a collection of n polygons?
Back-face culling is an example
of a criterion that can be applied anywhere
along the pipeline:
in world coords, eye coords, NDC, even in screen space !
Where is the best place in the pipeline to apply back-face culling?
What portion of the scene will it tend to eliminate, on average?
Suppose we clip our scene
to the frustum, then remove all back-facing polygons.
Are we done? That
is, does this solve our visibility problem?
No! For most
interesting scenes and viewpoints, some polygons will overlap;
somehow, we must determine
which portion of each polygon is visible to eye.


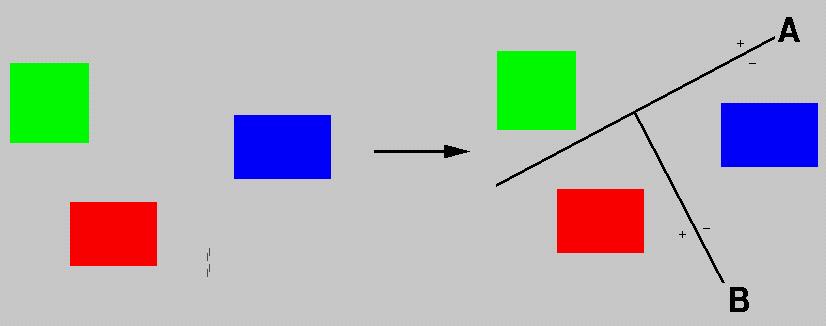
One possibility: simply
draw the polygons in the "right order" so that the
right picture results (example:
blue, then green, then peach). So is
visibility just a back-to-front
sorting problem?

In 2-D, for non-intersecting
line segments, yes -- visibility reduces to sorting.
However, in 3-D even non-intersecting polygons can form a cycle (above),
which has no valid visibility order!
Early algorithms for visibility
(now called "analytic" algorithms) computed the
set of visible fragments
directly, in object space, then rendered the fragments
to a pen plotter, or to
a vector display, or (a bit later on) to a framebuffer.
What is the cost of describing
(and computing) the fragment map at right (above)
for a scene composed of
n
polygons (say, triangles or quadrilaterals)?
... It's quadratic in n !
Now, as soon as renderers
were invented, people started crafting geometric models.
Realism called for lots
of polygons, which spelled trouble for these costly algorithms.
So, for about a decade (from
the late '60s to the late '70s) there was intense interest
in finding efficient algorithms
for efficient hidden surface removal.
There's quite an extended
literature about this; today I'll show just two nifty algorithms, one
called BSP traversal
from 1979/80, and one called Warnock's algorithm, from 1968/69.
BSP traversal is one of a class of "list-priority" visibility algorithms


Building a tree from
non-polygonal objects
choose
split planes that "well-separate" objects from one another:

Dynamic query: Produce
ordered polygon list from the tree, instantaneous eyepoint
node::draw (viewpoint)
BSP traversal is called a
"hidden surface elimination" algorithm, but it doesn't
really "eliminate" anything;
it simply orders polygons so the resulting
picture is correct.
Can we always find a polygon
ordering (without fragments) that
gives the right rendered
image?
... Nope !
What are the time and space
requirements for a BSP tree of n polygons?
What is the cost of a query
for a single eyepoint?
Next: Warnock's algorithm
(1969). This is an elegant hybrid of object-space
and image-space computations,
based on a simple idea that has recurred
over and over again in computer
graphics: If the situation is too complex,
subdivide.
0) start with a "root viewport",
and list of all scene primitives
(transformed
to screen-space)
Then, recursively:
1) classify each object as incident, or outside of, viewport
2) if number of objects is
zero or one,
visibility
is established for this portion of the screen
else
subdivide
into smaller frusta, distribute incident objects to them, and recurse.

And how is the correct surface identified in this case?
Third example of a visibility operation is z-buffering (or depth buffering).
Both of the above algorithms
were proposed when memory was very expensive
(the first 512 x 512 framebuffer
cost more than fifty thousand dollars).
In the mid-70's, Ed Catmull
had access to a framebuffer and proposed a
radically new visibility
algorithm: z-buffering. The idea of z-buffering is
to resolve visibility
independently at each pixel.



At beginning of frame, initialize
all pixel depths to largest integer (distant background)
Properties of depth-buffer:
Previous Meeting .... Next Meeting ... Course Page
Last modified: Nov 1998
Prof. Seth Teller, MIT Computer Graphics Group, seth@graphics.lcs.mit.edu